随着人类空间活动的日益频繁,地球 轨道的人造空间目标数量迅速增加,空间碎 片来源主要包括在轨的废弃或失效卫星、 星箭分离后的火箭末级、火箭末级爆炸、空 间碎片撞击航天器、卫星或航天 器相撞、 反卫星实验等,70% 的空 间 目标都集 中于 500 ~ 1000km 的低轨道空间。空间碎片飞 行速度从每秒 7 千米至 15 千米不等,一个 直径为 10cm 的空间碎片可直接造成现役航 天器解体,而目前大于该尺度的空间目标已 超 30000 个,哈勃望远镜、航天飞机以及国 际太空站等均受到过空间碎片不同程度的撞 击。因此可以说低轨高密度的空间碎片很大 程度上对在轨有效卫星、人类空间活动等构 成威胁。研究表明,未来碎片之间的碰撞将 是增加其数量的最主要原因,如果不主动清 理,碎片的数量将指数级增长,太空终将堵 塞和饱和。
主动清理空间碎片是改变碎片当前轨 道,使其离轨达到清理目的。当前潜在的空 间碎片清理方案主要有捕获移除、电动绳系 离轨、激光推移离轨、增阻式离轨等。捕获 移除方案中的机械臂、飞网、飞矛等捕获技 术已经成功在轨验证,技术较为成熟,但捕 获后实施碎片移除仍需消耗大量燃料,成本极高。电动绳系离轨是以电动力绳系航天器 为基础,通过其系绳释放捕获器对碎片实施 准确捕获,之后利用高速绕地运行的导电系 绳切割地磁感线产生的电动力 , 使组合体减 速降轨,再入大气层烧毁。该方法受磁场分 布限制,只适用于约 1000km 以下,且存在 系绳易断裂、在轨部署及姿控难等问题,在 轨技术验证仍不成熟。激光推移离轨是一种 无接触式的清理方法, 对于尺寸稍大的碎片, 利用高能脉冲在碎片表面照射产生反推力, 从而改变碎片的运行轨道,实现降轨后再入 大气层;对于微小型碎片,直接用高能连续 光波冲击碎片使其汽化焚毁。该方法优势明 显,可无限重复使用,能进行远距离、非接 触清除,成本低,可以清除多种尺寸空间碎 片,但高能激光技术、目标捕获跟踪定向瞄 准技术等关键技术有待突破。增阻法是仅能 针对近地低轨道,通过改变待离轨碎片的面 质比,增加气动阻力,加速轨道衰减速度, 达到再入大气层烧毁目的;其方式包括粘着 泡沫 / 纤维、膨胀式气球、折叠阻力帆等, 针对不同特性碎片需要选取不同方案, 泡沫、 气球等物易因操作不当导致产生新的碎片, 使得清除效率降低。因此,当前碎片清理技 术仍处于在轨演示验证阶段,上述方案距离实际应用还有差距,未能找到一个在技术和 经济上都行之有效的方案。
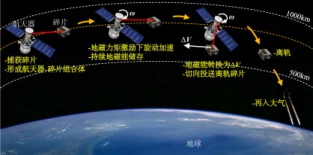
地球空间可以利用且可以无限获取的能 量来源主要有太阳能、地磁场能、空间粒子 的能量等,地磁场能的典型在轨成熟应用是 磁力矩器,它基于磁体在地磁场中的磁力和 磁力矩效应,被成功应用于低轨航天器的在 轨姿态调整及动量管理(如力矩控制机构飞 轮的卸载) 。同样, 利用低轨空间的地磁激励, 当对航天器磁强(大小和方向)进行主动控 制时,可以成为旋转式动量交换的角动量注 入源,不断加速旋动捕获后的碎片,满足降 轨条件则向大气层投送释放碎片,实现旋动 到平动的动量交换, 达到碎片快速离轨目的。 因此,我们创新地提出了如下图所示的低轨 碎片离轨新方法。
图 1 低轨碎片的地磁储能投送离轨原理
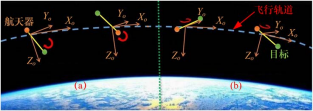
地磁储能投送离轨方法需要明确两点: 一是能量(角动量) 来源,即如何获取地磁 能;二是投送离轨,即如何储存、转换和释放地磁能达到离轨目的。上述过程中,牵扯 到诸多动力学与控制问题。投送航天器的可 旋转型离轨机构主动生成磁体(用磁矩矢量 描述) 时,在地磁场的磁力矩作用,同样也 会使得离轨机构旋动, 当主动持续控制磁矩, 使生成磁矩的方向与地球磁场磁矩的方向总 是存在夹角时, 则可实现离轨机构持续旋动, 将角动量持续注入到离轨机构,实现空间地 磁场能的获取,整个过程是对地磁场作用下 的旋动效应的持续累积。针对如何获取持续 地磁能,获得固定方向的持续旋动效应,解 耦飞行轨道、地磁场和航天器姿态,建立了 在航天器轨道坐标系的 Y 轴或 Z 轴持续旋动 累积角动量储能机理, 即空间定向旋动方向, 并提出了两种对应的航天器磁向调整策略。 理论分析证明两种定向储能机理可行,可根 据目标轨道规律灵活选择并储存地磁场能。
图 2 地磁定向储能机理建立:(a)Y 轴定向旋动储能;(b)Z 轴定向旋动储能
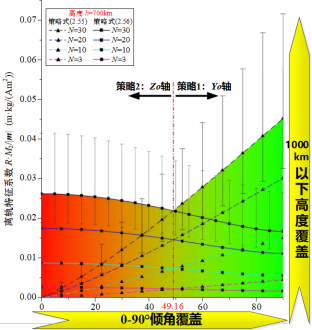
基于地磁场数字模型,进一步研究了定 向储能能力,建立两种储能策略下的储能计 算式,并通过仿真实验研究了相应的地磁储能能力包络,证明了方法具有极强的储能能 力与快速的离轨能力,对于地磁场稳定的区 域 ( 高度不大于 1000km) ,可以实现任意高 度和任意倾角的碎片离轨。航天器 105Am2 磁矩、旋动尺度 10m 下,投送离轨 10kg 量 级空间碎片仅需数小时到数天。
图 3 方法适用性及其离轨能力
在轨实际飞行过程中, 地磁场不断变化, 且高速旋动过程中,不可避免地会在非预期 方向累积附加角动量,航天器卸载附加累积 磁力矩将导致储能持续性中断,因此分析了 投送航天器轨道运行实际情况,研究在轨储 能的地磁场、轨道飞行解耦方法,建立了较优的分段地磁储能控制策略,将整个飞行储 能过程分为了储能段和卸载段,优化了分段 边界,极大提高单周期的地磁能利用率;此 外, 设计了多种在轨地磁储能目标投送系统, 给出相应的储能控制方法。
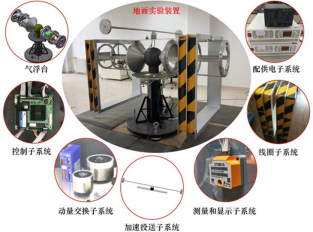
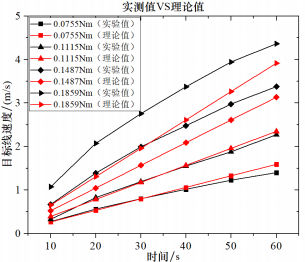
此外,分析了航天器 - 碎片组合体在轨 运行储能环境特性,包括空间微重力、高真 空、地磁场及其运行轨道等,明确地面实验 环境的同等搭建等效性需求,重点考虑地面 空气阻力矩、定点稳定地磁场环境等的实验 条件约束,提出了地面实验等效验证方法及 结果评价指标,并最终研制了天基地磁储能 地面原理装置, 开展了多工况(不同磁力矩) 的深入地面实验, 实验获取的加速线速度 ( 低 风阻的前 60s 数据 ) 和理论计算的线速度基 本吻合(图 5) ,验证了天基地磁能的获取、 转换和储存,具有技术可实现性。
图 4 地面地磁储能原理新装置
图 5 地面实验和理论线速度基本吻合
尽管地磁储能投送离轨低轨碎片的方法 存在待进一步研究的技术问题和工程实现问 题,但以现有的技术发展趋势来看,小巧低 功耗可控强磁体技术、在轨接近与捕获技术、 角动量管理与控制技术已基本突破,再加之 低轨空间地磁场客观物理环境,不存在难以 逾越的技术瓶颈,对比现有的碎片清除方法 和概念,其无工质消耗、快速离轨、高灵活 性以及低尺度依赖性使其未来在低轨空间有 较广的应用前景。
聚力储能、厚积薄发正是该研究传递给 我们的真理,科研工作中同样没有最快最短 的捷径,对待科研工作要甘于寂寞,敢于探索与创新,马克思曾讲“在科学上没有平坦 的大道,只有不畏劳苦沿着陡峭山路攀登的 人,才有希望达到光辉的顶点”,因此,我 们要在钱学森等老一辈科学家引领下,潜心 研究,砥砺前行,为实现中国航天强国梦尽 自己的一份微薄之力。
冯冠华,博士后,宽域 飞行工程科学与应用中心。 研究领域:1)空间无工质推 进技术;2)空间机器人在轨 状态预报技术。
李文皓,研究员,宽域 飞行工程科学与应用中心。 研究领域:1)复杂飞行动力 学与控制;2)空间机器人遥 操作;3)低轨道地磁推进与 投送。