力学所在流体仿生智能操控研究方面取得进展
流体的智能操控在基础研究以及实际应用等方面都有着重要的应用,如微流体装置、自清洁设备、微反应器等。许多生物体表面存在着液体定向输运以满足其生存所需。例如仙人掌刺可以收集水分并定向输运到它的身体,猪笼草可以捕捉空气中水分并在其捕虫器表面定向铺展,蝴蝶翅膀表面可以定向去除液滴等。研究者受自然界启发,制备了一系列具有特殊微结构的表面并实现了液体的定向输运。但是微结构表面由于微结构尺寸不可调、表面力学性能差等缺点限制了其在表面液体精确操控、分选领域的应用。
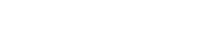
力学所超常环境非线性力学全国重点实验室研究团队联合北京航空航天大学、河北工业大学等,仿滨鸟喙和猪笼草叶缘的液体输运策略,以电场驱动为切入点,围绕液滴驱动和筛选机制,逐层深入地开展了系统的实验与理论研究工作,并成功开发了一种电场自适应润滑油浸入褶皱表面(EFAWS)。该工作以“Electric-field-adaptive wrinkled surface for tunable liquid manipulation: from precision droplet transport to selective screening”为题发表在《Advanced Functional Materials》上。
本研究将介电弹性体与润滑剂浸入的光滑表面相结合,通过设计圆环状电极,在电场的作用下形成放射状褶皱结构,且对电极形状、电极大小、预拉伸以及电极材料等影响因素进行探究。褶皱几何形状和润滑剂厚度可以通过电场动态调节,通过编程径向褶皱和润滑剂厚度来控制液滴的运动轨迹和速度,来实现不同体积液滴的定向传输和分选。理论模型揭示了表面变形和润湿动力学之间的关系,展示了由润滑剂厚度控制的尺寸相关的方向响应。EFAWS为设计智能界面建立了结构-场-属性关联性,在微反应器、集水和具有多参数控制功能的智能流体设备中具有重要应用。
图1 电场自适应起皱表面的设计。EFAWS的设计灵感来自于滨鸟喙喝水时不对称毛细力和猪笼草笼口边缘液体润滑层。在电场作用下可实时控制褶皱形貌,用于液滴聚结、筛选和收集
力学所特别研究助理李燕为论文第一作者。该研究工作得到国家自然科学基金、中国科学院战略性先导科技专项(B类)、中国科学院青年创新促进会等项目资助。
附件下载: