探索海洋——智能仿生机器鱼研制
地球表面 70% 以上被海洋覆盖,在广 袤的宇宙中是一颗名副其实的“蓝星”。海 洋拥有丰富的矿产和物种资源,具有重要的 科研价值。世界上先进海洋型国家已经制定 了各种开发和探索海洋的战略,我国也在 “十四五”制定了海洋战略,对海洋的深度探索全面展开。由于海洋内在环境的高度复 杂性,人类现阶段对海洋的认知非常有限。 工欲善其事,必先利其器,开发认识海洋必 须依靠强有力的装备工具来实现,因此载人 深潜器、遥控式水下机器人、自主式水下机 器人、水下滑翔机等水下航行器在此背景下快速发展起来。应用各种水下航行器,在民 用领域,可以快速完成海底地形扫描、资源 勘探、深海设施检测维修、海中搜救和海洋 生物跟踪观察等任务;在军事领域,可以用 于军舰追踪、水雷侦查引爆、特殊武器投放 等。
随着航行器向远距离、大深度、多功能 和智能作业方向发展,对能源技术、推进和 操纵技术等提出更高要求。当前传统的螺旋 桨推进是主要的水下航行推进方式,在获得 较高速度同时,存在机动性不足、响应滞后 以及明显水下噪声等问题。为了弥补这些不 足,科研人员开始对鱼类等水生生物开展了 大量研究,涵盖了力学、声学、材料、控制 等多个学科, 以期形成高性能的仿生潜航器。
鱼类等生物经历了四亿年漫长环境适应 和自然选择过程,进化出了多样的外形和完 备的生理结构,这些外形和结构相应地使其 具有了高效、快速、机动灵活等卓越的游动 性能。例如,蓝鳍金枪鱼在远距离巡游时的 游动速度最高可达 45 节(1 节约 0.5m/s) ; 白斑狗鱼在短时间内的机动加速度,最高能 超过 20g;蝴蝶鱼的转弯半径仅为 1/10 体长, 几乎可以实现原地转弯,上窜下跳。目前人 类命名的鱼类超过了 3 万种,而且不断有新 物种被发现。这些鱼类形态各异,有的适合 浅滩生活,有的在万米深渊生存,有的能万 里奔袭。正是鱼类在游动方面的优异表现, 引起了研究者对的兴趣。师法自然,把鱼类 的这些优点学习过来,研制仿鱼类水下潜航 器。为克服现有潜航器存在的缺点,提供了一个很有前景的解决方案。
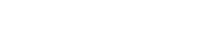
对鱼类运动方式进行一个初步的分类, 根据不同的运动机理,主要分为四种游动类 型:拍动、波动、脉动和拽动。拍动推进的 生物,如鲑鱼、金枪鱼、海豚和鲨鱼等,运 动主要集中在身体的后半部,通过周期性拍 动的尾鳍推动自身前进。波动推进的生物, 如鳗鱼、七鳃鳗和一些鳐鱼等,能沿着身体 或胸鳍产生横向行波将流体向后推动从而获 得推力,行波振幅通常从头到尾逐渐增加。 再一类如水母、鱿鱼、和一些软体动物等, 周期性地摄入一定量的水,然后通过射流来 产生推力,这种推进方式称为脉动。此外, 人类、海龟、海豹和鸭子等以拖拽为基础的 游泳者像划桨一样推动身体前行,这种推进 方式称为拽动。对于大多数游动生物而言, 主要采用的是拍动推进和波动推进。拍动推 进和波动推进可以基于驱动波长进行区分。 波动推进的生物产生的波长通常比自身体长 短,而拍动推进恰恰相反。参照前人的分类 方式,鱼类推进运动模式从波动到拍动可以 进一步细分为四种:鳗鲡模式、亚鲹科模式、 鲹科模式和鲔科模式。
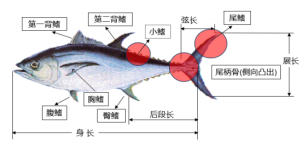
图 1 身体 - 尾鳍运动模式鱼的鳍肢分布示意图
通过对鱼类的推进方式的观察和模仿, 研究者研制出多种机器鱼。相比鱼类漫长的 进化,机器鱼的历史短很多,世界上第一条 仿生机器鱼,1994 年诞生于麻省理工学院的 仿生金枪鱼“查理”(Robotuna) ,大约 1.2m 长。从第一条机器鱼诞生到现在,也就二十 多年的光景。很多常见或者特点鲜明的鱼类, 基本都被作为仿造对象,如机器鳗鱼、仿生 太阳鱼、仿生鲨鱼、仿生蝠鲼、仿生鳐鱼、 仿生水母、仿生扇贝等。研究仿生机器鱼, 是要把外表做的很像吗?就蜡像馆中的蜡像 很逼真,具有强烈视觉效果,但缺乏实际意 义的功能。我们需要从理论研究出发,结合 工程实际,将力学、机械、控制和材料等多 个方面有机结合,才能从形似到神似,实现 预想功能。
以典型的身体 - 尾鳍推进的鱼为研究对 象,鱼体上有各种鳍肢,特别是起主导作用 的尾鳍。身体 - 尾鳍在往复摆动过程中会产 生不同旋向的附着涡,并在游动过程中沿尾 鳍迅速脱落,在尾迹形成交错排列的反卡门 涡街。在反卡门涡之间,尾迹区域会形成一 系列连续射流,产生的反作用力会推动鱼体 向前游动。在稳态游动过程中,鱼体尾迹射 流的反作用力约占推力的 70%,且鱼体尾部 的变形量会影响尾涡的脱落强度。故机器鱼 的设计需要考虑尾迹流体对机器鱼的反作用 力,通过涡流控制等方式来提高游动效率。
鱼类具有优异的游动性能与生理结构密 切相关,在仿生机器鱼的研制中,大部分机 器鱼采用多关节串联驱动方式,即一个电机 驱动一个关节通过控制每个电机的运动来控制每节鱼体的摆动角度和速度。以此来拟合 鱼的游动身体曲线,这种方法已经很接近鱼 类游动时的体态。但是这种方法对电机的同 步性要求较高,同时随着关节数增多控制起 来也比较复杂,功耗较高。随着柔性机构在 机器人领域的兴起,因此提出柔性推进智能 潜水器的理念,我们提出了一种线驱动仿生 机器鱼,由于高度的欠驱动,其柔性很大, 适合进行大幅度的柔性摆动;一个电机控制 一对拉线,极大地减少了所需的电机数量和 控制难度。
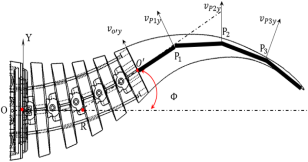
图 2 柔性驱动机构
鱼在拍动推进时会采用主动和被动相结 合的运动方式,主动运动是由肌肉产生的行 波通过身体传遍全身的各个部位,然后身体 将动量传递到周围流体,产生向前移动的动 力。被动运动发生在流体推动身体时,导致 生物形态变化而不涉及到肌肉,如鱼鳍产生 被动变形。其中尾鳍是产生推进的关键结构, 一系列实验和数值研究表明,形状参数(如 凹凸形式、面积矩、后掠角、展弦比等)对 尾鳍动力学特征及尾迹涡结构影响显著。尾 鳍的刚度,对机器鱼的推进效率和游动速度 产生较大影响。鱼类的鳍通常是刚度不均匀 的。基于活体观察、简化模型实验和数值分析对这一问题进行了广泛而深入的研究。发 现具有非均匀刚度分布的柔性板,可以实现 更快的推进速度,且效率更高、消耗更低。 我们利用硅胶制成尾鳍,并加入不同刚度加 强筋改变材料属性,进行试验,相对于 3D 打印的刚性鱼尾,相同条件下的推进速度得 到提升。

图 3 尾鳍涡数值模拟
鱼类的推进过程是一个典型而复杂的流 固耦合问题, 身体和尾鳍都具有一定的弹性, 环境适应性较好, 其推进变形是结构惯性力、 肌肉控制力和外部流体力耦合作用的结果, 并以此来提升自身的游动性能。在这些相关 理论研究和工程实践的基础上,最终形成了 主被动结合和欠驱动拉线式的仿生机器鱼, 并实现了水下试验, 最高游速到达 0.5m/s, 并具初步具备了智能避障和深度潜航(1500 米)的功能。
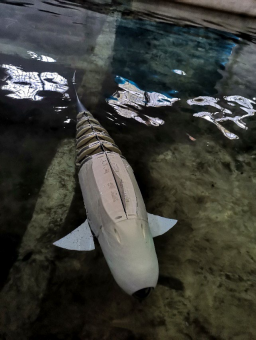
图 4 仿生机器鱼水池试验
从师法自然走向道法自然,从向鱼类一 步步学习,到应用到实际。目前的仿生机器 鱼的应用多数处于试验性质,距离大规模量 产和工程实际应用,还有非常长的路要走, 利用智能仿生机器鱼探索海洋任重道远,未 来可期。

银波,副研究员,中国 科学院流固耦合系统力学重 点实验室,研究领域:流固 耦合数值方法;仿生潜航器。
附件下载: